Orocos Project documentation¶
What is Orocos?¶
Open Robot Control Software (Orocos)
Orocos is a portable C++ libraries for advanced machine and robot control.
Over the years, Orocos has become a large project of middleware and tooling for development of robotics software. The main parts of this project are the Real Time Toolchain (RTT) and the Orocos Component Library (OCL).
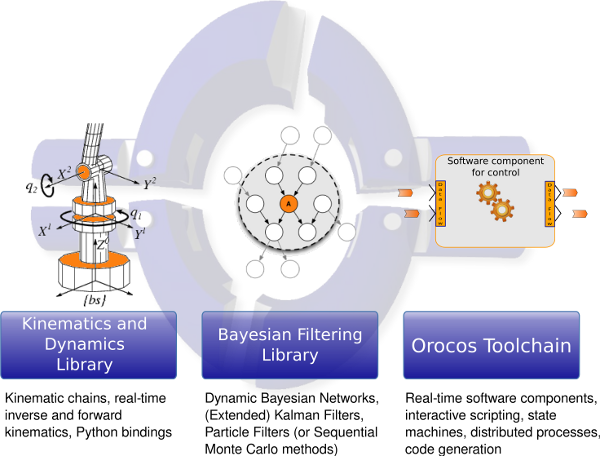
Orocos Real-Time Toolkit (RTT): a component framework that allows us to write real-time components in C++.
Orocos Component Library (OCL): the necessary components to start an application and interact with it at run-time.
Orocos Log4cpp (log4cpp): a patched version of the Log4cpp library for flexible logging to files, syslog, IDSA and other destinations.
Additional libraries were also developed to complement the bundle for advance machine and robot control. These libraries include calculation of kinematic chains, filtering and advance task specification among others.
Kinematics and Dynamics Library (KDL): an application independent framework for modeling and computation of kinematic chains.
Bayesian Filtering Library (BFL): an application independent framework for inference in Dynamic Bayesian Networks, i.e., recursive information processing and estimation algorithms based on Bayes’ rule.
Reduced Finite State Machine (rFSM): a small and powerful statechart implementation in Lua.
Instantaneous Task Specification using Constraints (iTaSC): is a framework to generate robot motions by specifying constraints between (parts of) the robots and their environment.
ROS integration¶
Orocos framework is well integrated with ROS, a popular software bundle with the largest community among roboticists to design new applications. Most of the concepts from both frameworks map well and are largely supported.
Scope of the documentation¶
The documentation in this site is limited to the software libraries that are directly developed within the Orocos project. Many other assets are documented externally and links to other sites are also provided.
Note
There has been a large migration effort from the previous site as communicated recently in ROS Discourse.
As a consequence this site is still under construction and therefore some specific pages are still under development.